Agroécologie Temps de lecture 3 min
Coopération et intelligence artificielle : les atouts du robot efficace en plein champ
Publié le 06 février 2019

En pleine mutation, le secteur agricole doit produire davantage pour répondre aux besoins d’une population croissante et, simultanément, réduire son impact environnemental. Cette évolution impose de repenser les pratiques et d’envisager de nouveaux moyens de production. Parmi eux, la robotique semble particulièrement pertinente. Outre constituer le socle d’une agriculture de précision, plus respectueuse de l’environnement, les robots représentent une alternative évidente pour soulager et protéger les agriculteurs dans les tâches les plus pénibles, répétitives et dangereuses.


L'agriculture doit faire face à une multiplication des épisodes climatiques extrêmes pour assurer une alimentation durable. Parmi les leviers agronomiques, l'agroécologie, que les agroéquipements, mécaniques et numériques devront accompagner par l'innovation. Notre dossier.
De la spécificité des robots des champs
C’est en réponse à ces enjeux que des chercheurs des centres INRAE de Clermont-Ferrand et de Montpellier se sont lancés en 2014 dans le projet ADAP2E. Leur but ? Concevoir un robot reconfigurable pour s’adapter à la diversité des tâches agricoles et à la variabilité morphologique des parcelles. « Si les robots fonctionnent très bien en contexte industriel où tous les paramètres sont parfaitement maîtrisés et anticipés, ils sont beaucoup moins performants en milieu naturel. Pour cette raison, les robots agricoles existants sont dédiés à une seule tâche. Notre challenge était donc double : développer un robot polyvalent et qui soit stable et fiable dans un environnement par nature changeant et imprévisible », commente Roland Lenain, chercheur en robotique à INRAE et coordinateur du projet.
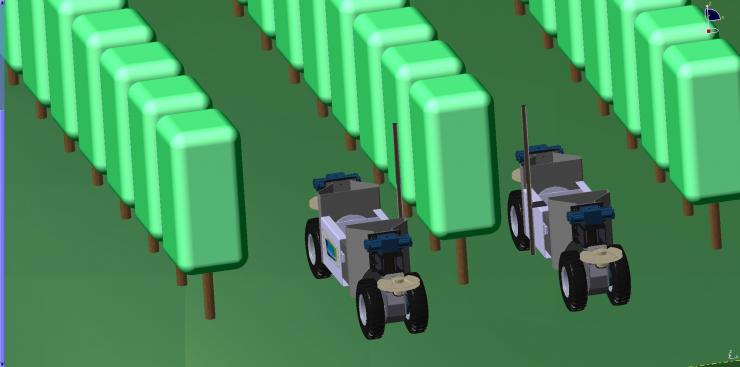
En s’attelant au cas de la viticulture, un des secteurs agricoles aux contraintes les plus complexes (pénibilité, variabilité des types de parcelles et des opérations culturales), les chercheurs ont rapidement réalisé qu’un seul robot n’était pas le dispositif le plus pertinent pour atteindre le degré de mobilité nécessaire aux objectifs fixés : pour circuler entre les rangs de vignes et au-dessus, porter des outils, faire un prélèvement sur la vigne, etc., le robot devait en effet pouvoir modifier sa hauteur, sa largeur, son centre de gravité… D’où leur idée de développer un système robotique coopératif associant 2 robots, plus simples, moins fragiles, moins coûteux et offrant de plus grandes capacités d’adaptation.
Une plateforme robotique autonome
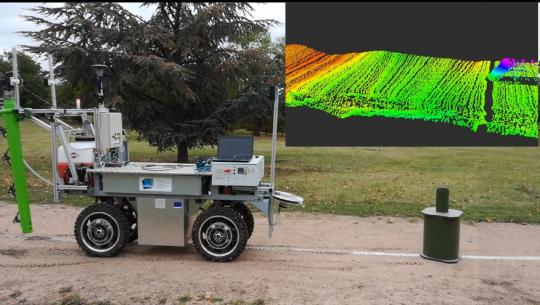
Quatre ans plus tard, l’objectif est atteint. L’équipe d’ADAP2E a conçu un système robotique à 2 robots, reconfigurable mécaniquement (adaptation physique par modification de ses suspensions ou de sa garde au sol) et algorithmiquement (adaptation du processus décisionnel) selon les tâches à mener et les données reçues de son environnement. Pour y parvenir, les chercheurs ont d’abord modélisé les comportements élémentaires du robot nécessaires à la réalisation des opérations agricoles (suivi d’une trajectoire, d’un piéton ou d’une cible, détection d’obstacles…), en les combinant aux systèmes de perception les plus adaptés - GPS, laser, balise radio, caméra… - qui permettent au robot de reconstruire son environnement.
« À partir d’une dizaine de comportements types, dont certains n’avaient jamais été modélisés, nous avons établi l’enchaînement des comportements à mobiliser pour effectuer une tâche agricole donnée. Nous avons ainsi réalisé une « machine à états » qui permet de sélectionner en temps réel les comportements successifs que le robot doit utiliser selon l’opération agricole planifiée par l’agriculteur, et son contexte », commente Roland Lenain.
Une plateforme universelle et bientôt capable de gérer l’imprévu
Et l’innovation ne s’arrête pas là. Les chercheuses et les chercheurs travaillent à associer cette plateforme robotique, aujourd’hui finalisée, à divers outils agricoles pour conduire des opérations plus spécifiques et les rendre plus performantes. Dans le cadre de plusieurs partenariats industriels, le système robotique est ainsi testé en association avec des outils de pulvérisation pour les vignes (planification, définition des zones de traitement prioritaires, contrôle en temps réel et à distance par le viticulteur), mais aussi avec des outils de binage et de désherbage mécanique (projet Pumagri) ou d’attelage et de dételage (projet AtellAgri). Des travaux qui ouvrent de nouveaux champs de recherche et notamment l’étude des interactions entre le robot, l’outil et l’environnement1.
« Parallèlement, nous voulons accroître l’intelligence artificielle de notre système robotique pour lui permettre de se reconfigurer de façon autonome lorsqu’il rencontre une situation imprévue. Il s’agit de développer un processus adaptatif dynamique qui permettrait au robot, empêché dans sa mission, de sortir de l’enchaînement prédéfini et de replanifier lui-même sa mission, sous la supervision de l'agriculteur », conclut Roland Lenain.
Fiche d’identité du projet ADAP2E
- Nom : Plateforme de production adaptative et autonome pour l'environnement
- Dates : 2014-2018
- Coût total : 1,8 million € - Financement ANR 370 000 € (programme Jeunes chercheuses, Jeunes chercheurs)
- Partenaires : INRAE Clermont-Ferrand, INRAE Montpellier
- Label : pôle de compétitivité Viameca
Consulter le site internet ADAP2E
1 Deux thèses viennent de débuter, respectivement sur le contrôle de mouvements coordonnés pour un manipulateur bi-bras mobile agile et sur le contrôle coordonné d'un manipulateur mobile pour la réalisation de travaux dynamiques en milieux naturels.